Control theory is central to understanding and shaping the behavior of dynamic systems. This work focuses on designing feedback and feedforward strategies, with a particular emphasis on digital and iterative control mechanisms.
By studying discrete-time and event-based dynamics, this research explores how synchronization, stability, and nonlinear behaviors emerge in digital oscillators. These insights are especially relevant for modern embedded and cyber-physical systems.
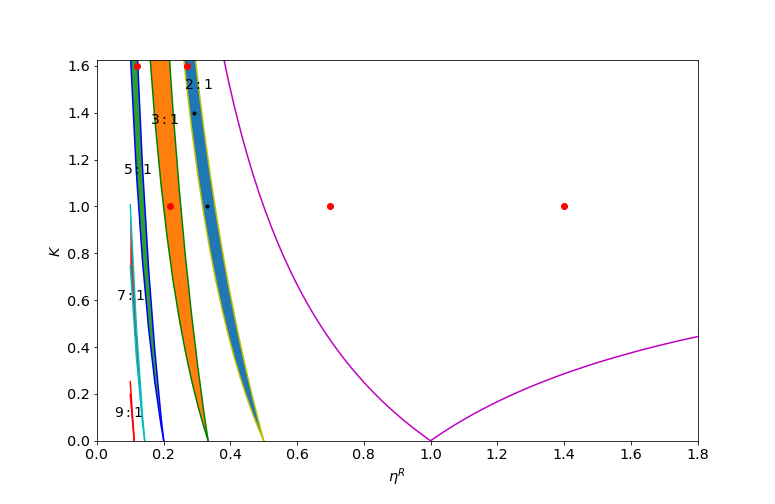
Analysis of synchronization regions and parameter structures in digital oscillators.
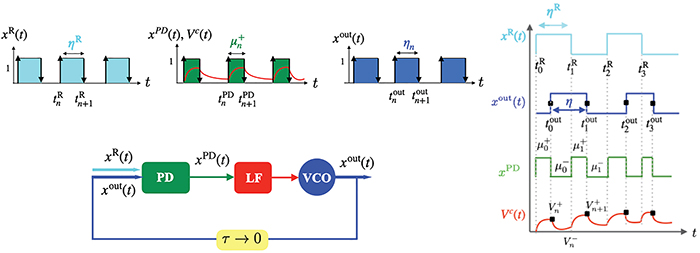
A discrete-event modeling framework for capturing oscillator dynamics.