Human Tracking in 3D Point Cloud Sequences Detection, Tracking, and Motion Estimation
This report presents the design and implementation of a complete pipeline for processing, detecting, and tracking a human within timestamped 3D point cloud sequences stored as PCD files. The goal of the project is to compute a consistent human trajectory, maintain a stable identity across frames, and estimate instantaneous and smoothed velocity.The pipeline includes:
• Loading and parsing raw binary PCD files.
• Preprocessing and voxel downsampling.
• Human detection using DBSCAN clustering.
• Multi-frame temporal tracking via a Kalman Filter.
• Track-to-detection association using the Hungarian Algorithm.
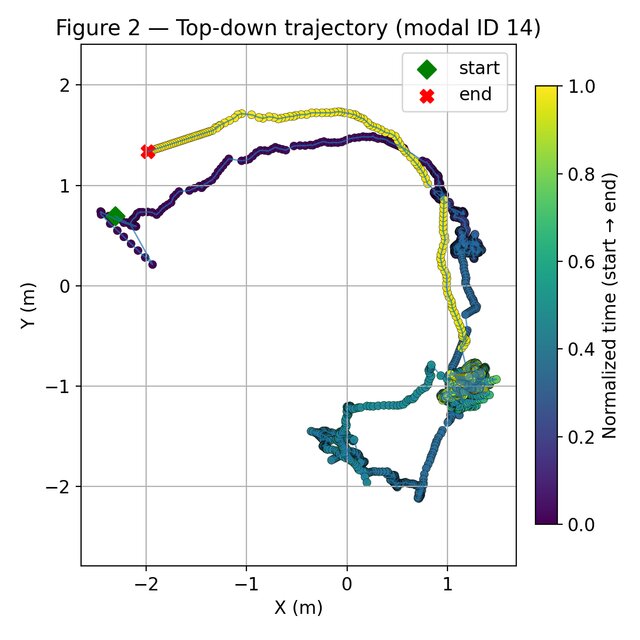
• Trajectory and speed computation over time.
This workflow mirrors the perception stack used in autonomous robots, mobile mapping systems, and advanced motion analytics.